‘Anklebot’ helps determine ankle stiffness; could aid in rehabilitation from strokes, other motor disorders
28 Oct 2013
For most healthy bipeds, the act of walking is seldom given a second thought: one foot follows the other, and the rest of the body falls in line, supported by a system of muscle, tendon, and bones.
 | |
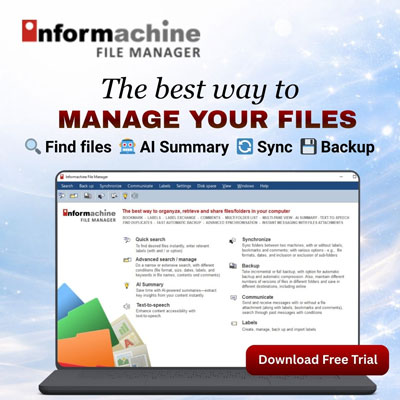
| A front and side view of a volunteer wearing the Anklebot in a seated posture. During experiments, the robot moved the ankle and recorded its stiffness in multiple directions. |
Upon closer inspection, however, locomotion is less straightforward. In particular, the ankle - the crucial juncture between the leg and the foot - is an anatomical jumble, and its role in maintaining stability and motion has not been well characterized.
''Imagine you have a collection of pebbles, and you wrap a whole bunch of elastic bands around them,'' says Neville Hogan, the Sun Jae Professor of Mechanical Engineering at MIT. ''That's pretty much a description of what the ankle is. It's nowhere near a simple joint from a kinematics standpoint.''
Now, Hogan and his colleagues in the Newman Laboratory for Biomechanics and Human Rehabilitation have measured the stiffness of the ankle in various directions using a robot called the ''Anklebot.''
The robot is mounted to a knee brace and connected to a custom-designed shoe.
As a person moves his ankle, the robot moves the foot along a programmed trajectory, in different directions within the ankle's normal range of motion.
Electrodes record the angular displacement and torque at the joint, which researchers use to calculate the ankle's stiffness.
From their experiments with healthy volunteers, the researchers found that the ankle is strongest when moving up and down, as if pressing on a gas pedal. The joint is weaker when tilting from side to side, and weakest when turning inward.
Interestingly, their measurements indicate that the motion of the ankle from side to side is independent of the ankle's up and down movement. The findings, Hogan notes, may help clinicians and therapists better understand the physical limitations caused by strokes and other motor disorders.
The researchers report their findings in the journal IEEE Transactions on Neural Systems and Rehabilitation Engineering. The paper's co-authors are Hyunglae Lee, Patrick Ho, and Hermano Krebs from MIT and Mohammad Rastgaar Aagaah from Michigan Technological University.
A robotic walking coach
Hogan and Krebs, a principal research scientist in MIT's Department of Mechanical Engineering, developed the Anklebot as an experimental and rehabilitation tool.
Much like MIT-Manus, a robot they developed to improve upper-extremity function, the Anklebot is designed to train and strengthen lower-extremity muscles in a ''cooperative'' fashion, sensing a person's ankle strength and adjusting its force accordingly.
The team has tested the Anklebot on stroke patients who experience difficulty walking. In daily physical therapy sessions, patients are seated in a chair and outfitted with the robot. Typically during the first few sessions, the robot does most of the work, moving the patient's ankle back and forth and side to side, loosening up the muscles, ''kind of like a massage,'' Hogan says. The robot senses when patients start to move their ankles on their own, and adapts by offering less assistance.
''The key thing is, the machine gets out of the way as much as it needs to so you do not impose motion,'' Hogan says. ''We don't push the limb around. You the patient have to do something.''
Many other robotic therapies are designed to do most of the work for the patient in an attempt to train the muscles to walk. But Hogan says such designs are often not successful, as they impose motion, leaving little room for patients to move on their own.
''Basically you can fall asleep in these machines, and in fact some patients do,'' Hogan says. ''What we're trying to do with machines in therapy is equivalent to helping the patients, and weaning them off the dependence on the machine. It's a little bit like coaching.''
Ankle mechanics
In their most recent experiments, the researchers tested the Anklebot on 10 healthy volunteers to characterize the normal mechanics of the joint.
Volunteers were seated and outfitted with the robot, as well as surface electrodes attached to the ankle's four major muscles. The robot was connected to a video display with a pixelated bar that moved up and down, depending on muscle activity.
Each volunteer was asked to activate a specific muscle - for example, to lift the foot toe-up - and maintain that activity at a target level, indicated by the video bar. In response, the robot pushed back against the ankle movement, as volunteers were told not to resist the robot's force.
The researchers recorded each muscle's activity in response to the robot's opposing force, and plotted the results on a graph. They found that in general, the ankle was stiffest when toe-up or toe-down, while less stiff from side to side. When turning inward, the ankle was least stiff - a finding that suggests this direction of movement is most vulnerable to injury.
Understanding the mechanics of the ankle in healthy subjects may help therapists identify abnormalities in patients with motor disorders. Hogan adds that characterizing ankle stiffness may also be useful in designing safer footwear - a field he is curious to explore.
''For example,'' Hogan says, ''could we make aesthetically pleasing high heels that are stiffer in the inversion/eversion [side to side] direction? What is that effect, and is it worth doing? It's an interesting question.''
For now, the team will continue its work in rehabilitation, using the Anklebot to train patients to walk.




.webp)